金星探査機搭載非冷却中間赤外カメラ
総括: 田口 真(国立極地研究所)
班員: 今村 剛、中村正人(宇宙航空研究開発機構)
岩上直幹、上野宗孝、下山 学(東京大学)
福原哲哉(総合研究大学院大学)
はしもとじょーじ(神戸大学)
1.金星探査ミッション
金星探査計画は赤外から紫外までをカバーする光学撮像観測機器を搭載した探査機(Venus Climate Orbiter: VCO)を金星周回軌道に投入し、金星気象学上の諸問題の解明を主目的とする惑星探査計画である。VCOに搭載されるイメージャーは波長が短い方から、紫外カメラ(UVI)、雷・大気光カメラ(LAC)、短波長赤外イメージャー(SIR)、中間赤外メージャー(MIR)、長波長赤外イメージャー(LIR)の5種類である。波長によって光が発せられる金星大気高度や放射メカニズムが異なることを利用して、金星大気を立体的に可視化する。VCOは三軸姿勢制御によって撮像観測時にカメラ搭載面を金星へ向ける。周期30時間で逆行する周回軌道運動を利用して、金星大気の4日循環場に乗って連続撮像を行う。スーパーローテーションや子午面循環のメカニズム解明、メソスケール現象や大気散逸過程の解明、雷放電、大気光、火山活動など未知の現象の探索を目的とする。VCOは2008年打ち上げ、2010年金星到着を目指して開発が進められている。ここではVCO搭載LIRの概要と開発状況、LIRに撮像検出器として使用されている非冷却マイクロボロメータ素子(UMAD)の衛星観測への応用について述べる。
2.長波長赤外イメージャー
LIRは波長10μm付近の中赤外領域を使って、高度45〜70kmに広がる雲層上端からの熱放射を撮像する屈折光学系イメージャーである。雲頂温度差から雲頂高度差を導出し、その時間変化を追うことによって、雲の水平構造と大気循環場を導出する。
|
表1.LIRの主な仕様 |
||
|
観測対象温度 |
230K |
|
|
観測波長域 |
9〜11μm |
|
|
光学系F値 |
1.4 |
|
|
レンズ材質 |
Ge |
|
|
レンズ構成 |
3群3枚 |
|
|
シャッター |
メカニカルシャッター |
|
|
検出器 |
非冷却マイクロボロメータアレイ |
|
|
画素数 |
240×240 |
|
|
画素サイズ |
37μm |
|
|
積分時間 |
1.06秒 |
|
|
視野 |
12°×12° |
|
|
角度分解能 |
0.05°(金星面上で100kmに相当) |
|
|
温度分解能 |
0.3K |
|
|
絶対温度決定精度 |
3K |
|
|
質量 |
4.5kg (LIR-S: 3.0kg, LIR-AE: 1.5kg) |
|
|
寸法 |
LIR-S |
153mm×400mm×100mm |
|
LIR-AE |
110mm×220mm×190mm |
|
|
消費電力 |
観測時 |
11.4W (LIR-S: 5.0W, LIR-AE: 6.4W) |
|
スタンバイ時 |
4.4W (LIR-S: 1.1W, LIR-AE: 3.3W) |
|
|
データレート |
288kByte/Rev (TBD) |
|
LIRはセンサー部LIR-Sと電子回路部LIR-AEに分かれる。表1にLIRの主な仕様を、また、図1にLIR-Sの概略を示す。LIRは市販の赤外カメラ(NEC製IRV2300U)に基づいて開発されている。IRV2300Uは酸化バナジウムを抵抗素子とするUMADを検出器として用いている。UMADについては後で詳しく述べるが、冷却装置を必要としないため、センサーの小型、軽量、低消費電力化に大きく貢献している。
太陽に近く熱環境が厳しい金星周回軌道で安定した撮像を実現するために、センサー全長の半分以上を大型フードが占める。フードからの熱放射が雑音源とならないように、フードの温度は300K以下となるように設計される。視野12°は遠金点から金星面を見込む角度である。UMADは320×240素子あるが、そのうち240×240素子を使う。角度分解能は0.05°となり、遠金点から金星面上での水平距離100kmまで分解可能である。
1秒の積分時間で0.3Kの温度分解能と3Kの絶対温度決定精度を実現できる見込みである。モーターによる開閉式メカニカルシャッターを使用して撮像前後にUMADの温度校正を行う。
図2にLIR-AE回路ブロック図を示す。デジタル部はボロメータパッケージを駆動するためのタイミングの生成、補正制御、HKデータのA/D変換等を行う。アナログ部は読み出されたボロメータ出力の増幅、A./D変換、ペルチエ素子による温度安定化を司る。コマンド・データはLIR-DEと受け渡しされる。
図2.LIR回路ブロック図。
3.開発の現状
2003年度、LIRは性能を実証するために、搭載センサーの試作品を設計し、製作を進めている。試作品はUMADを市販赤外カメラから流用し、その他の部品は宇宙用部品に置き換えられている。試作品は市販カメラとほぼ同じ撮像機能を有する。今後、試作品の性能評価、試作品を使ったボロメータアレイの環境試験などを進めていく予定である。
試作品の製作と平行して市販カメラを利用したボロメータアレイの性能評価実験も行っている。冷凍機でマイナス40℃まで冷却した黒体塗装アルミ板を市販カメラで撮像し、画像に含まれるノイズを評価した。図3に一部に+1℃の温度差を作った黒体板を撮像し、得られた画像のある画素一行分のプロファイルを示す。黒体板の温度は-40℃から20℃まで10℃毎に変えている。
結果を簡単に報告すると、温度によらず固定パターンノイズが存在し、特に低温時に検出温度限界を悪化させる原因となっている。しかし今後固定パターンノイズの性質を詳しく解析することによって、固定パターンノイズは校正データを使って補除去できると見込んでいる。また、温度によらず画像周辺が明るくなる現象も見られる。この原因はまだはっきりしないが、素子かカメラに本質的に備わっている性質のようである。これも常に同じ傾向を保つようならば、校正データで除去できる。
4.非冷却ボロメータアレイ検出器
HgCdTe、InSb、GaAs、InGaAs等の半導体赤外検出器は通常、感度を上げるために冷却装置を必要とする。冷却装置は要求温度差によってペルチエ素子からジュール・トムソン冷却器、ヘリウム冷凍機等いくつか種類があるが、多かれ少なかれ電力、重量、スペース、コストというリソースを要求する。一方、UMADは冷却装置が不要なため、小型、軽量、低消費電力、低コストという大きな利点がある。また冷凍機から生じる振動の悪影響もない。UMADは軍事用途から発展してきたが、この10年で一般用途に赤外カメラとして市販されるようになってきた。消火活動、夜間自動車運転補助、被災・遭難者の捜索、不審者の監視等に利用されている。
UMADは現在も開発が続けられて、年々性能が向上している。各メーカーが開発したUMADの性能比較を表2に載せた。ボロメータ材質としては酸化バナジウムが一般的であるが、アモルファスシリコンを使った物もある。素子数は増加の方向と素子サイズは縮小の方向に開発が進んでいる。雑音と等価になる温度差(NETD)は一世代前素子では数十mKであったものが、10mK台の素子も出現してきている。
|
表2.各種UMADの比較 |
||||
|
メーカー |
ボロメータ材質 |
素子数 |
素子サイズ [μm] |
NETD [mK] (F/1, 30Hz) |
|
BAE SYSTEMS |
VOx |
320×240 |
46 |
55 |
|
VOx |
320×240 |
28 |
150 |
|
|
VOx |
640×480 |
28 |
- |
|
|
Boeing |
VOx |
320×240 |
51 |
80 |
|
Sofradir |
Amorphous Si |
320×240 |
45 |
80 |
|
Raytheon |
VOx |
320×240 |
50 |
10 |
|
VOx |
320×240 |
25 |
35 |
|
|
VOx |
640×480 |
25 |
- |
|
|
NEC |
VOx |
320×240 |
37 |
34 |
|
Mitsubishi |
Amorphous Si |
320×240 |
40 |
15 |
上記の特徴からUMADは衛星搭載センサーとして非常に適しているため、地球観測衛星や惑星探査機のセンサーとして応用が始まっている。衛星から惑星からの赤外放射を計測すると、その赤外放射を放出している場所の情報が得られる。衛星からの赤外撮像観測には大気、雲、地表面、海水面の温度導出、放射量からの2次情報として雲頂高度、大気微量成分量、地熱分布、表面組成分布の導出、さらに火山や山火事監視等の用途がある。
具体例をあげると、NASA/GSFCのグループはLockheed-Martin社製UMADを利用してISIRという赤外センサーを試作した。これはプッシュブルームタイプの赤外センサーで、衛星搭載赤外センサーのベンチマークAVHRRに匹敵する感度を持つ。スペースシャトルに搭載されSTS-85ミッションで実証試験に供された。雲、陸、海洋からの赤外放射を複数のバンドで計測し、雲頂温度、雲種等の情報を得た。さらにISIRをもとにしてCOVIRを開発した。COVIRはスペースシャトルに搭載されて、実証試験を行い、実用型衛星搭載センサー開発に繋げていくようである。
2001年にNASAが打ち上げた火星探査機Mars Odysseyに搭載されたTHEMISも複数のバンドを持つプッシュブルームタイプの赤外センサーである。Mars Odysseyは火星の極周回軌道に投入され、THEMISを含むセンサーで地表面サーベイ観測を行った。図4にその観測例を示す。THEMISにはRaytheon社製UMADが使用されている。これはUMADが惑星探査に利用された最初の例である。
今後、UMADの技術革新は続き、UMADは冷却型赤外センサーに取って代わって、衛星搭載赤外イメージセンサーとしてますます利用されて行くであろうことは間違いない。
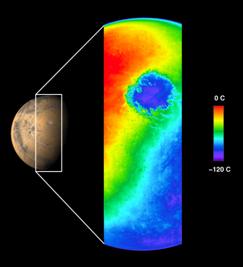
図4.Mars 2001 Odyssey/THRMISによって得られた火星表面赤外画像の例(THEMIS Web Siteより)。