|
|
水星表面探査機 MPO |
English>> |
|
|
|
|
|
|
詳細は、
ESA/BepiColombo homepage
をご参照ください。 |
|
|
|
|
|
MPO探査機 [Mercury Planetary Orbiter] : 目標 |
|
|
|
|
|
MPO探査機は、水星の表層・内部構造の解明を主目的とするもので、
ESAがこの「開発」および「水星軌道での運用」を担う。
太陽に最も近い領域で形成された水星。
巨大な中心核を持つなどその特異な内部と表層は、
太陽系形成における「地球型惑星の起源と進化」を知る手掛りとなる。
MPO探査機は、以下の解明を目指している。
- 巨大な鉄の中心核(全体の3/4)の解明
重力場の全球詳細マッピングを行い、水星の内部構造を明らかにする。
- 形成初期の姿を残す表面地形の解明
全表面(特にMESSENGERが十分な探査を行わない南半球)の
詳細撮像を行い、表面地形の成因解明を目指す。
- 鉱物・元素組成の解明
全表面の赤外~紫外分光、X線・γ線・中性子観測、
表面から放出されるガスの直接計測によって、水星の起源に手掛りを得る。
- 極の氷の存在
γ線・中性子観測によって、水の存在を検証する。
|
|
|
|
|
|
|
|
|
|
|
|
MPO探査機:概観 |
|
|
|
|
|
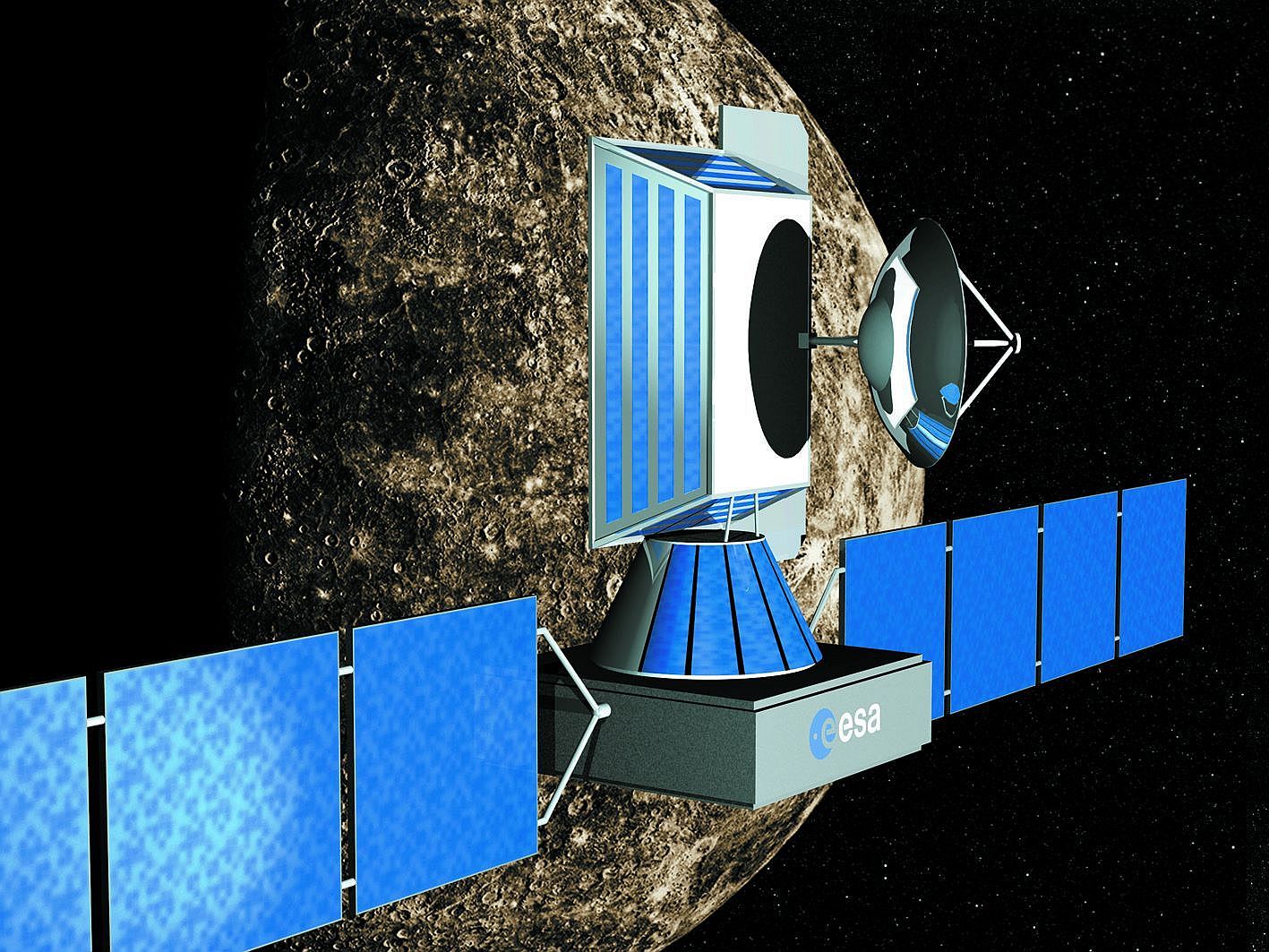
MPOは、3軸制御型探査機である。
これは、搭載されたカメラおよび各種分光器・センサーを、直下の惑星表面へ志向させ続けるためである。
(NASA/MESSENGER探査機は、探査機姿勢を太陽に対してほぼ固定する。
MPO探査機は常に直下表面を見る姿勢を取るため、精密な計測が可能である。)
強力な太陽光に対しては、常に耐熱シールドの面が向くように姿勢を制御し、
冷却を必要とする機器などを含めて探査機本体の温度を低く保つ設計をとっている。
MPOの軌道は、詳細な表面・内部構造のマッピングを行うために
「近水点400km、遠水点1,500km」のほぼ円軌道をとっている。
MPOは、水星到着までの間、MMO探査機・SEPM(電気推進モジュール)・CPM(化学推進モジュール)と
結合した「全体モジュール」の頭脳として活動する。
到着後には推進モジュールを切り離し、独立した探査機として活動する。
運用は、欧州宇宙管制センター [ESA/ESOC] ((ドイツ)
からESAのアンテナ施設を用いてなされる。
|
|
|
|
|
|
|
|
|
|
|
|
MPO探査機:観測装置の選抜 |
|
|
|
|
|
観測装置は、MPO・MMOの両探査機の双方において日欧間の公募に基づき2004年秋に選ばれた。
[このため、MMO探査機に欧州の研究者が、MPO探査機に日本の研究者が、それぞれ入る。]
現在、観測装置開発チーム群が形成され、各所で活発な議論・検討・試験・開発が行われている。
[日本の研究者は、紫外線・X線・γ線/中性子・中性粒子・磁場計測器に加わっている。]
また、水星到着後の観測計画は、観測機器を提供したグループのみならず、理論研究者なども巻き込んだ「共同観測チーム」によって立案
・実施していく。
|
|
|
|
|
|
|
|
|
|
|
|
MPO探査機:仕様 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BepiColombo計画:探査機仕様へ |
|
|
|
|
|
|
|
|